Created a simulation where a Roomba-like robot identifies its environment through the use of cameras, proximity sensors, and accelerometers.
The image below shows the robot in its environment, and the top left square shows the robot's camera view when attempting to identify the red balls.
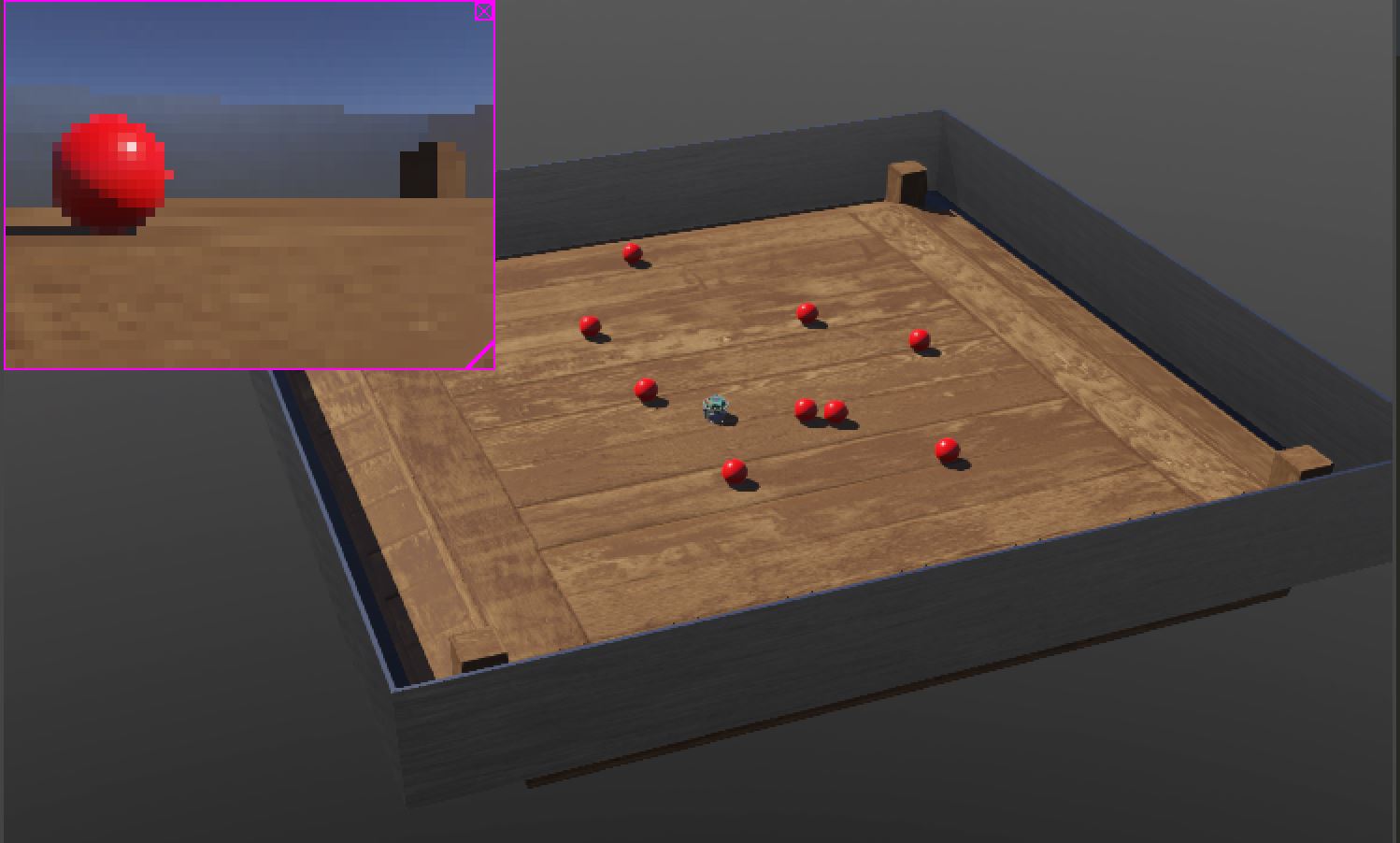
Once a red ball is identified, the robot navigates its environment with left and right motors to push the balls off the edge of the map.